In this paper, we propose an estimation algorithm for
spatially-variant blur due to camera motion. To estimate
the most accurate latent image, we integrated depth
sensor (Microsoft Kinect) and IMU sensor with the camera.
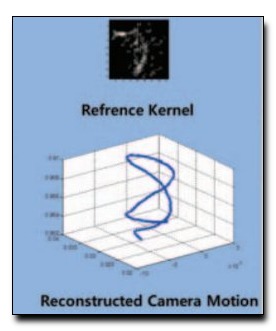
The joint analysis of the blurry image, IMU data and the
depth data provide better recovery of the real camera
motion during the course of the exposure. The reconstructed
camera trajectory along with the depth map is then used
to synthesize a spatially-variant blur kernel to estimate the
final latent (non-blurry) image. The results show that our
algorithm effectively compensates the motion blur from the
original image while taking scene geometry into account.
Download: pdf
Text Reference
Hyeoungho Bae, Charless Fowlkes, and Pai H Chou.
Accurate motion deblurring using camera motion tracking and scene depth.
In
IEEE Workshop on Applications of Computer Vision (WACV). 2013.
BibTeX Reference
@inproceedings{BaeFC_WACV_2013,
author = "Bae, Hyeoungho and Fowlkes, Charless and Chou, Pai H",
title = "Accurate Motion Deblurring using Camera Motion Tracking and Scene Depth",
booktitle = "IEEE Workshop on Applications of Computer Vision (WACV)",
year = "2013",
tag = "geometry"
}
