The confluence of robust algorithms for structure from
motion along with high-coverage mapping and imaging of
the world around us suggests that it will soon be feasible
to accurately estimate camera pose for a large class photographs taken in outdoor, urban environments. In this paper, we investigate how such information can be used to
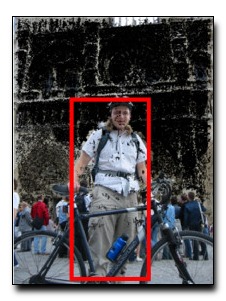
improve the detection of dynamic objects such as pedestrians and cars. First, we show that when rough camera
location is known, we can utilize detectors that have been
trained with a scene-specific background model in order to
improve detection accuracy. Second, when precise camera
pose is available, dense matching to a database of existing images using multi-view stereo provides a way to eliminate static backgrounds such as building facades, akin to
background-subtraction often used in video analysis. We
evaluate these ideas using a dataset of tourist photos with
estimated camera pose. For template-based pedestrian detection, we achieve a 50 percent boost in average precision
over baseline.
Download: pdf
Text Reference
Raúl Díaz, Sam Hallman, and Charless C. Fowlkes.
Detecting dynamic objects with multi-view background subtraction.
In
ICCV. 2013.
BibTeX Reference
@inproceedings{DiazHF_ICCV_2013,
author = "D{\'\i}az, Ra{\'u}l and Hallman, Sam and Fowlkes, Charless C.",
title = "Detecting Dynamic Objects with Multi-View Background Subtraction",
booktitle = "ICCV",
year = "2013",
tag = "geometry"
}
