Articulated pose estimation with flexible mixtures-of-parts
We describe a method for human pose estimation in static images based on a
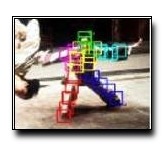
novel representation of part models. Notably, we do not use articulated limb
parts, but rather capture orientation with a mixture of templates for each
part. We describe a general, flexible mixture model for capturing contextual
co-occurrence relations between parts, augmenting standard spring models that
encode spatial relations. We show that such relations can capture notions of
local rigidity. When co-occurrence and spatial relations are tree-structured,
our model can be efficiently optimized with dynamic programming. We present
experimental results on standard benchmarks for pose estimation that indicate
our approach is the state-of-the-art system for pose estimation, outperforming
past work by 50% while being orders of magnitude faster.
Download: pdf
Text Reference
Yi Yang and Deva Ramanan.
Articulated pose estimation with flexible mixtures-of-parts.
In
CVPR. 2011.
BibTeX Reference
@inproceedings{YangR_CVPR_2011,
author = "Yang, Yi and Ramanan, Deva",
booktitle = "CVPR",
title = "Articulated pose estimation with flexible mixtures-of-parts",
year = "2011"
}
