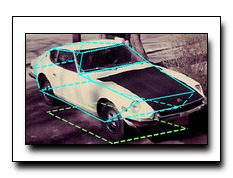
We present an approach to detecting and analyzing the 3D configuration of objects
in real-world images with heavy occlusion and clutter. We focus on the application
of finding and analyzing cars. We do so with a two-stage model; the first stage
reasons about 2D shape and appearance variation due to within-class variation
(station wagons look different than sedans) and changes in viewpoint. Rather
than using a view-based model, we describe a compositional representation that
models a large number of effective views and shapes using a small number of
local view-based templates. We use this model to propose candidate detections
and 2D estimates of shape. These estimates are then refined by our second stage,
using an explicit 3D model of shape and viewpoint. We use a morphable model
to capture 3D within-class variation, and use a weak-perspective camera model
to capture viewpoint. We learn all model parameters from 2D annotations. We
demonstrate state-of-the-art accuracy for detection, viewpoint estimation, and 3D
shape reconstruction on challenging images from the PASCAL VOC 2011 dataset.
Download: pdf
Text Reference
Mohsen Hejrati and Deva Ramanan.
Analyzing 3d objects in cluttered images.
In P. Bartlett, F.C.N. Pereira, C.J.C. Burges, L. Bottou, and K.Q. Weinberger, editors,
Advances in Neural Information Processing Systems 25, pages 602–610.
2012.
URL:
http://books.nips.cc/papers/files/nips25/NIPS2012_0287.pdf.
BibTeX Reference
@incollection{HejratiR_NIPS_2012,
author = "Hejrati, Mohsen and Ramanan, Deva",
editor = "Bartlett, P. and Pereira, F.C.N. and Burges, C.J.C. and Bottou, L. and Weinberger, K.Q.",
title = "Analyzing 3D Objects in Cluttered Images",
booktitle = "Advances in Neural Information Processing Systems 25",
pages = "602--610",
year = "2012",
url = "http://books.nips.cc/papers/files/nips25/NIPS2012_0287.pdf"
}
