We tackle the problem of estimating the 3D pose of an individual’s
upper limbs (arms+hands) from a chest mounted
depth-camera. Importantly, we consider pose estimation
during everyday interactions with objects. Past work shows
that strong pose+viewpoint priors and depth-based features
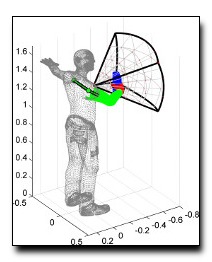
are crucial for robust performance. In egocentric views,
hands and arms are observable within a well defined volume
in front of the camera. We call this volume an egocentric
workspace. A notable property is that hand appearance
correlates with workspace location. To exploit this correlation,
we classify arm+hand configurations in a global egocentric
coordinate frame, rather than a local scanning window.
This greatly simplify the architecture and improves
performance. We propose an efficient pipeline which 1) generates
synthetic workspace exemplars for training using a
virtual chest-mounted camera whose intrinsic parameters
match our physical camera, 2) computes perspective-aware
depth features on this entire volume and 3) recognizes discrete
arm+hand pose classes through a sparse multi-class
SVM. We achieve state-of-the-art hand pose recognition
performance from egocentric RGB-D images in real-time.
Download: pdf
Text Reference
Grégory Rogez, James S. Supan\vc i\vc III, and Deva Ramanan.
First-person pose recognition using egocentric workspaces.
In
CVPR. 2015.
BibTeX Reference
@inproceedings{RogezSR_CVPR_2015,
AUTHOR = "Rogez, Gr{\'e}gory and Supan{\vc}i{\vc} III, James S. and Ramanan, Deva",
TITLE = "First-Person Pose Recognition using Egocentric Workspaces",
BOOKTITLE = "CVPR",
YEAR = "2015",
tag = "people"
}
