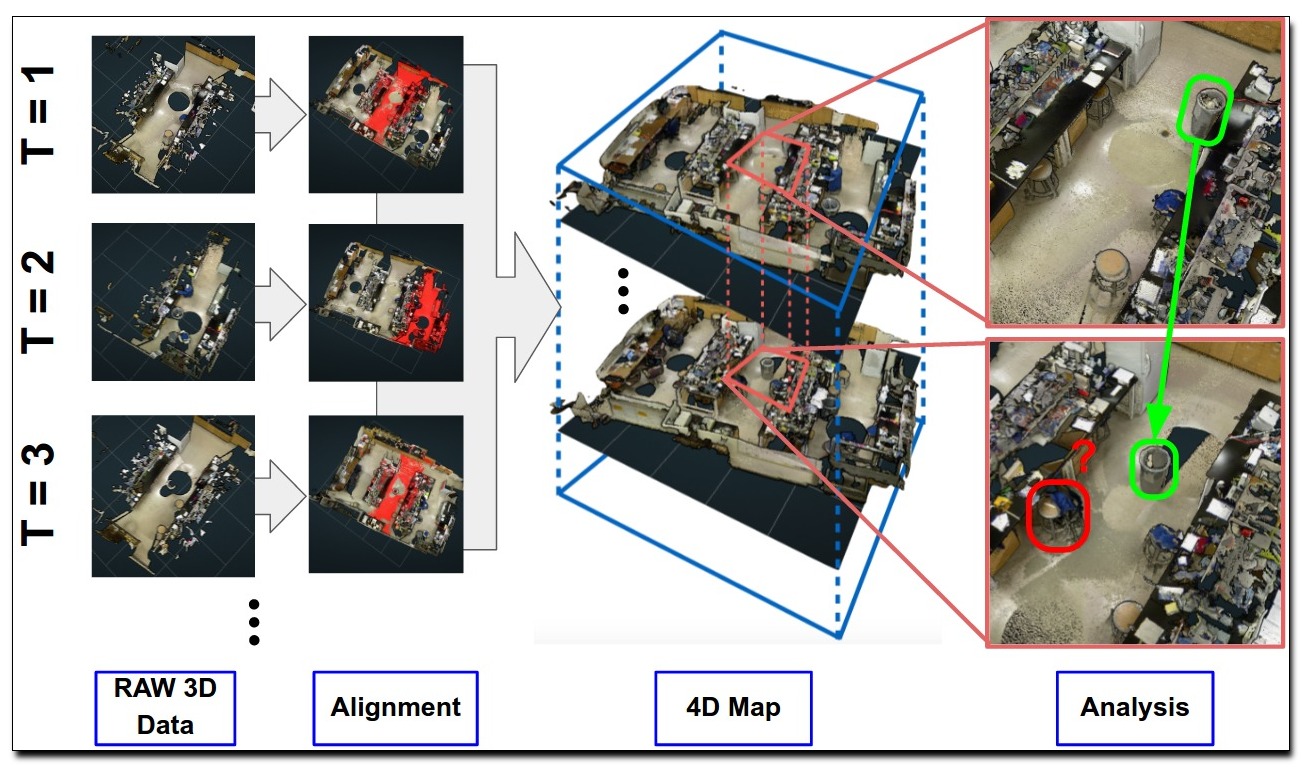
This paper addresses the problem of building a spatio-temporal model of the
world from a stream of time-stamped data. Unlike traditional models for
simultaneous localization and mapping (SLAM) and structure-from-motion (SfM)
which focus on recovering a single rigid 3D model, we tackle the problem of
mapping scenes in which dynamic components appear, move and disappear
independently of each other over time. We introduce a simple generative
probabilistic model of 4D structure which specifies location, spatial and
temporal extent of rigid surface patches by local Gaussian mixtures. We fit
this model to a time-stamped stream of input data using
expectation-maximization to estimate the model structure parameters (mapping)
and the alignment of the input data to the model (localization). By explicitly
representing the temporal extent and observability of surfaces in a scene, our
method yields superior localization and reconstruction relative to baselines
that assume a static 3D scene. We carry out experiments on both synthetic RGB-D
data streams as well as challenging real-world datasets, tracking scene
dynamics in a human workspace over the course of several weeks.
Download: pdf
Text Reference
Minhaeng Lee and Charless C. Fowlkes.
Space-time localization and mapping.
In
IEEE International Conference on Computer Vision. 2017.
BibTeX Reference
@INPROCEEDINGS{LeeF_ICCV_2017,
author = "Lee, Minhaeng and Fowlkes, Charless C.",
booktitle = "IEEE International Conference on Computer Vision",
title = "Space-Time Localization and Mapping",
year = "2017",
tag = "geometry"
}
